Ungrounded Haptic Feedback for Ultrasound Probes
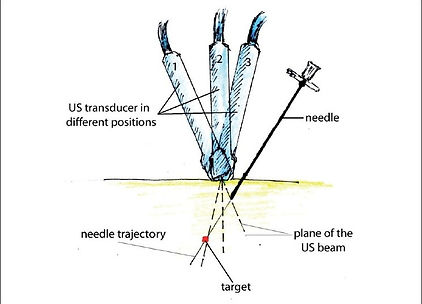
In Ultrasound-guided needle interventions, it is desirable to track the needle and target through the ultrasound images. By providing current and desired trajectories on the screen, clinicians can adjust their needle insertion to better reach targets in the patient. For this tracking to be possible, the ultrasound transducer must be held at an appropriate position and angle to get a good image of both the needle and target.
By providing haptic feedback through the ultrasound probe, we can guide the clinician holding the probe to the best position and angle. Ungrounded haptic feedback is challenging, because there is no base for reaction forces to be applied against. Typical kinesthetic feedback devices are mounted to a still surface and have a limited work-space. For ungrounded haptic feedback for this application, we will instead draw on other techniques like flywheel-driven torques and directional vibrations.
Image from International Journal of Shoulder Surgery
Publications
J. M. Walker, H. Culbertson, M. Raitor, A. M. Okamura, "Haptic Orientation Guidance Using Two Parallel Double-Gimbal Control Moment Gyroscopes," in IEEE Transactions on Haptics. 2017.
M. Raitor, J. M. Walker, A. M. Okamura, and H. Culbertson, “WRAP: Wearable, Restricted-Aperture Pneumatics for Haptic Guidance.” International Conference on Robotics and Automation. 2017.
H. Culbertson, J. M. Walker, M. Raitor, and A. M. Okamura, “WAVES: A Wearable Assymmetric Vibration Excitation System for Presenting Three-Dimensional Translation and Rotation Cues.” CHI Conference on Human Factors in Computing Systems. 2017.